Succesfully added to Request List!
Art. 11693
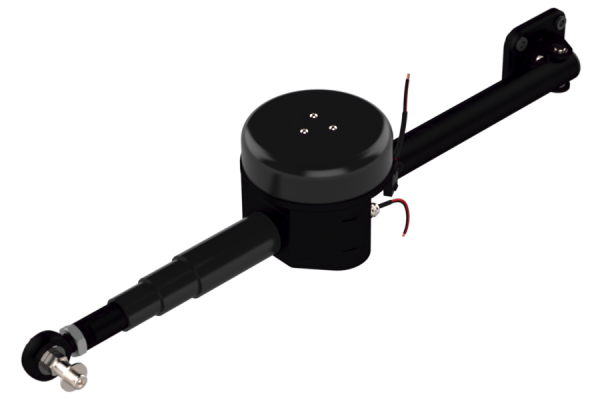
Linear drive autopilot drive units (20′ to 45′)
Transmission drive unit 200 Nm 12 volts (30′ to 60′)
Transmission drive unit 300 Nm 24 volts (40′ to 90′)
Direct drive autopilot drive unit type I (30′ to 45′)
Direct drive autopilot drive unit type II (40′ to 55′)
Direct drive autopilot drive unit type III (50′ to 70′)
General questions and answers on which autopilot to choose
Instrument pods
Username or email address *
Password *
Remember me Log in
Lost your password?